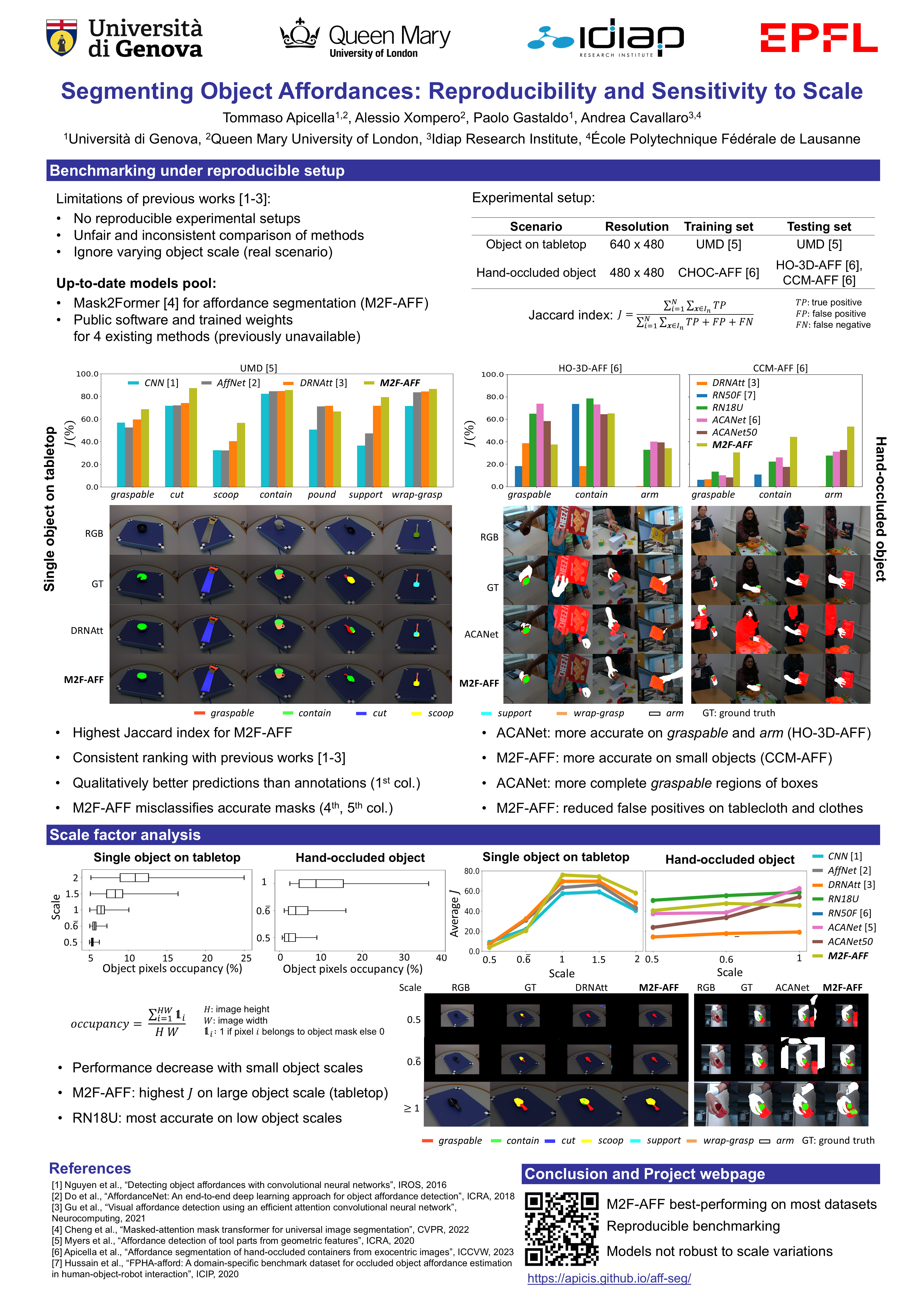
Visual affordance segmentation identifies image regions of an object an agent can interact with. Existing methods re-use and adapt learning-based architectures for semantic segmentation to the affordance segmentation task and evaluate on small-size datasets. However, experimental setups are often not reproducible, thus leading to unfair and inconsistent comparisons. In this work, we benchmark these methods under a reproducible setup on two single objects scenarios, tabletop without occlusions and hand-held containers, to facilitate future comparisons. We include a version of a recent architecture, Mask2Former, re-trained for affordance segmentation and show that this model is the best-performing on most testing sets of both scenarios. Our analysis show that models are not robust to scale variations when object resolutions differ from those in the training set.
Poster